Introduzione
Perché async/await sembra uguale in entrambi i linguaggi, ma nasconde filosofie radicalmente diverse
Negli ultimi anni async/await è diventato onnipresente: lo usiamo in Python con asyncio, lo troviamo in JavaScript, lo vediamo comparire nei framework HTTP, nei client per database, nei wrapper per le API. Quando però si passa a Rust e a Tokio, molti sviluppatori hanno una sensazione strana: la sintassi sembra familiare, ma il modo in cui bisogna pensare al codice asincrono è radicalmente diverso.
In questo articolo proverò a fare ordine: partiremo dal problema che l’asincrono risolve davvero, poi metteremo a confronto il modello di Python e quello di Rust, usando Tokio come lente per capire cosa significa avere un runtime “a costo zero” ma guidato dal compilatore. Concluderemo con alcune linee guida pratiche — e con qualche storia dal campo tratta da PR recenti su Tokio e su progetti Python.
Questa non è stata solo un’esplorazione teorica. Come vedrete più avanti, ho avuto l’opportunità di contribuire sia a Tokio che a progetti Python dell’ecosistema GenAI, un’esperienza che ha approfondito la mia comprensione delle differenze tra i due modelli asincroni.
Il problema che l’asincrono risolve davvero
Prima di entrare nei dettagli, vale la pena resettare il vocabolario: concorrenza e parallelismo non sono sinonimi, e l’asincrono non è una bacchetta magica per “andare più veloce”.
I/O-bound vs CPU-bound
La distinzione fondamentale è tra:
- I/O-bound: il programma passa la maggior parte del tempo aspettando qualcosa di esterno — una risposta HTTP, una query al database, un file da disco, un token da un LLM.
- CPU-bound: il programma passa la maggior parte del tempo calcolando — comprimere dati, addestrare un modello, fare hash di password.
L’asincrono brilla nel primo caso: invece di bloccare un thread (costoso in memoria e context switch) mentre aspettiamo, cediamo il controllo a un event loop che nel frattempo può far avanzare altri task.
Il modello a thread OS e i suoi limiti
Il modello classico “un thread per richiesta” funziona bene fino a un certo punto. Un server che gestisce 10.000 connessioni simultanee con altrettanti thread rischia di:
- Consumare gigabyte di memoria (ogni thread ha il suo stack).
- Passare più tempo a fare context switch che a eseguire codice utile.
- Diventare imprevedibile sotto carico.
L’event loop risolve il problema multiplexando molte operazioni I/O su pochi thread (spesso uno solo). Ma richiede un cambio di mentalità: ogni task deve cedere esplicitamente il controllo nei punti in cui aspetta qualcosa.
Un esempio identico in superficie
Guardiamo due snippet che fanno la stessa cosa: recuperano un utente dal database e il suo profilo da un servizio HTTP, poi li fondono.
| |
| |
La sintassi è quasi identica. La domanda che guiderà il resto dell’articolo è: perché questi due snippet vivono in mondi così diversi?
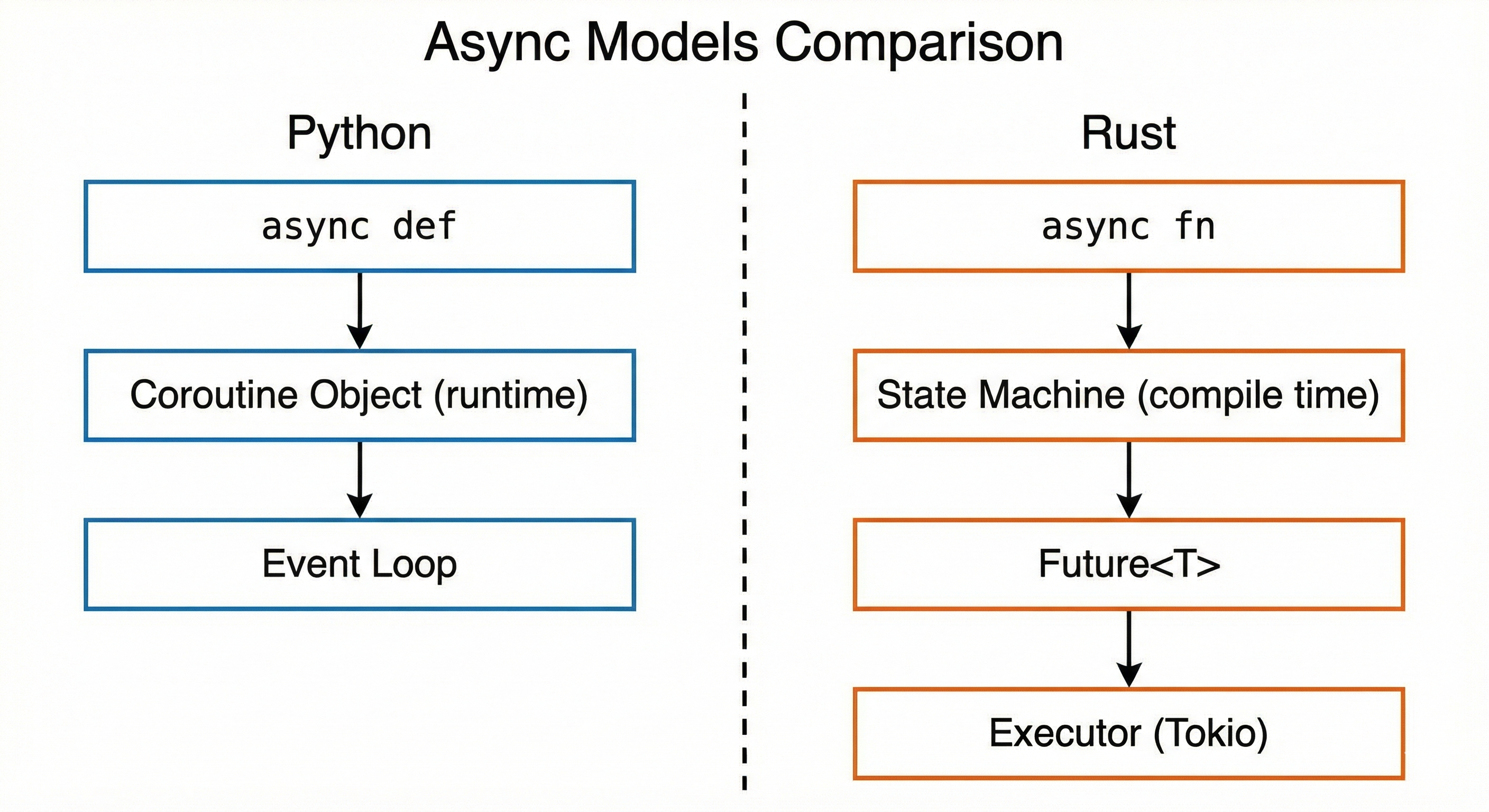 Confronto tra i modelli asincroni: Python con runtime generoso vs Rust con state machine a compile time
Confronto tra i modelli asincroni: Python con runtime generoso vs Rust con state machine a compile time
Python: l’asincrono come feature del runtime
In Python, async/await è un pattern di alto livello agganciato a un runtime generoso che “si occupa lui” di molti dettagli. Questo lo rende estremamente produttivo, ma nasconde costi che prima o poi emergono.
Come funziona l’event loop
Quando scrivi async def, Python crea un oggetto coroutine. Quando chiami await, la coroutine cede il controllo all’event loop, che può far avanzare altri task in attesa. L’event loop è tipicamente single-threaded e fornisce:
- Uno scheduler per le coroutine.
- Primitive I/O (socket, subprocess, file con supporto limitato).
- Integrazione con librerie esterne (aiohttp, asyncpg, aioredis, ecc.).
Il modello è semplice e potente, ma ha alcune caratteristiche da tenere a mente:
- Granularità grossa: il context switch avviene solo sui punti
await. Se fai lavoro pesante tra unawaite l’altro, blocchi tutto. - Tipi dinamici: le coroutine sono oggetti opachi; il type system non ti dice molto su cosa contengono o quanto costano.
- Costo in memoria: ogni task ha un overhead relativamente alto (centinaia di byte) e poco trasparente.
Il GIL: l’elefante nella stanza
Python ha il Global Interpreter Lock (GIL), che impedisce l’esecuzione parallela di bytecode Python nello stesso processo. Per il codice I/O-bound questo spesso non è un problema: mentre aspetti la rete, il GIL viene rilasciato.
Ma attenzione: se dentro un async def fai lavoro CPU-intensive puro (parsing pesante, calcoli numerici in Python puro, ecc.), bloccherai l’intero event loop. La soluzione classica è offloadare su un thread pool o un process pool — ma questo introduce complessità e overhead.
Un errore comune: async che non è async
Questo punto è particolarmente insidioso. Ho recentemente contribuito a datapizza-ai, un framework Python per soluzioni GenAI, dove ho trovato un pattern molto diffuso ma problematico:
| |
Il metodo a_embed() era marcato async, ma non conteneva nessun await. Risultato: chi lo chiamava con await a_embed(...) si aspettava di cedere il controllo all’event loop, ma in realtà il codice bloccava tutto per l’intera durata dell’embedding.
La fix è stata usare asyncio.to_thread() per offloadare il lavoro bloccante:
| |
Questo pattern è molto più comune di quanto si pensi. Il takeaway: async def non rende magicamente il codice non-bloccante. Se non ci sono await su operazioni I/O reali, stai solo aggiungendo overhead senza benefici.
Quando asyncio brilla
Nonostante i limiti, asyncio è eccellente per:
- API server che fanno principalmente I/O (FastAPI, aiohttp).
- Orchestrazione di chiamate a servizi esterni.
- Scripting avanzato dove la velocità di sviluppo conta più delle performance pure.
- Prototipazione di sistemi che potrebbero evolvere verso soluzioni più performanti.
L’ecosistema è enorme, la learning curve è dolce per chi già usa Python, e per la maggior parte dei casi d’uso è good enough.
Rust: l’asincrono come state machine
In Rust, async/await ha lo stesso aspetto sintattico, ma si materializza in qualcosa di completamente diverso: una state machine generata dal compilatore, con layout in memoria noto a compile time.
Futures: non magia, ma tipi
Quando scrivi async fn in Rust, il compilatore non crea un “oggetto coroutine” dinamico. Genera invece un tipo che implementa il trait Future<Output = T>. Questo tipo è una state machine esplicita:
- Ogni
awaitdiventa un punto di sospensione. - Lo stato della funzione (variabili locali, punto di esecuzione) viene “impacchettato” nella struct generata.
- La dimensione della Future è nota a compile time.
Questo significa che:
- Niente allocazioni nascoste: sai esattamente quanta memoria usa ogni task.
- Niente overhead di runtime per la gestione delle coroutine: il compilatore ha già fatto tutto il lavoro.
- Type safety completa: il sistema di tipi ti dice se una Future è
Send(può attraversare thread) oSync(può essere condivisa).
Il runtime è esterno: entra Tokio
Ma le Future da sole non fanno nulla. Servono un executor che le esegua e un reactor che gestisca l’I/O. Qui entra Tokio, il runtime asincrono più usato in Rust.
Tokio fornisce:
- Un thread pool con work stealing (i thread inattivi “rubano” task da quelli occupati).
- Uno scheduler per le Future.
- Un reattore I/O basato su epoll/kqueue/io_uring.
- Primitive come
TcpStream,UdpSocket, timer, canali MPSC, mutex async.
La macro #[tokio::main] crea il runtime e esegue la tua async fn main:
| |
Un punto cruciale: in Rust puoi scegliere runtime diversi. Tokio è il più popolare, ma esistono alternative come async-std, smol, glommio (ottimizzato per io_uring). Il contratto tra il tuo codice e il runtime è il trait Future, il che rende l’ecosistema molto componibile.
Il costo della precisione: Send, Sync, Pin
La precisione di Rust ha un prezzo in complessità iniziale. Tre concetti che in Python non esistono (o sono impliciti) diventano espliciti:
- Send: “Questo valore può essere spostato su un altro thread.” Se la tua Future contiene un
Rc<T>(reference counting non thread-safe), non saràSende non potrai usarla contokio::spawn. - Sync: “Questo valore può essere condiviso tra thread.” Rilevante per dati condivisi in contesti async.
- Pin: “Questo valore non può essere spostato in memoria.” Necessario per alcune Future che contengono riferimenti a se stesse.
All’inizio questi vincoli sembrano ostili. Con il tempo, diventano una rete di sicurezza: il compilatore ti impedisce di scrivere data race, anche in codice asincrono complesso.
Tokio vs asyncio: confronto diretto
Mettiamo a confronto i due approcci su dimensioni concrete.
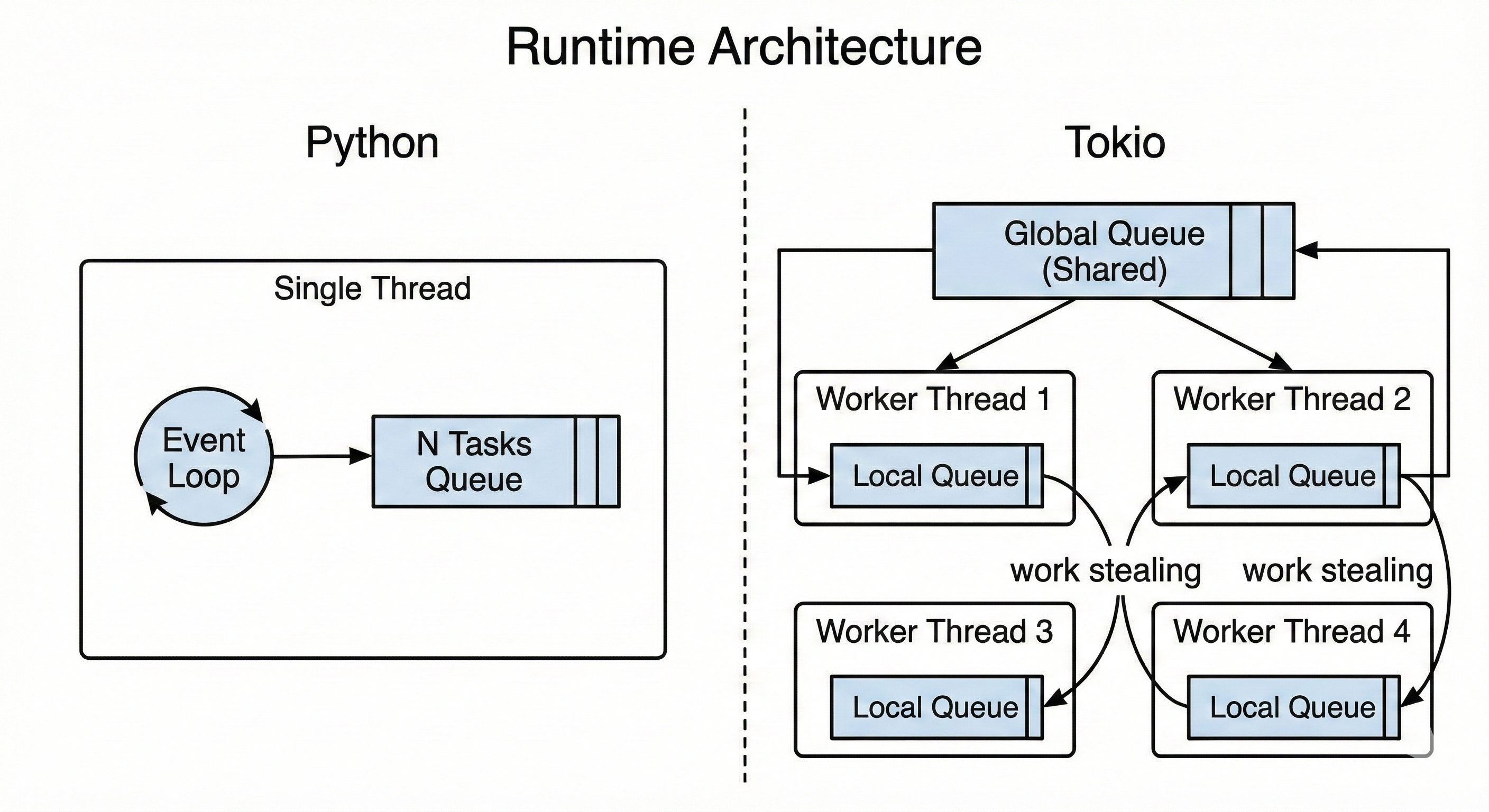 Architettura dei runtime: asyncio single-threaded con event loop vs Tokio multi-threaded con work stealing
Architettura dei runtime: asyncio single-threaded con event loop vs Tokio multi-threaded con work stealing
| Aspetto | Python asyncio | Rust + Tokio |
|---|---|---|
| Modello di tipo | Coroutine dinamica | Future<T> con layout noto a compile time |
| Runtime | Integrato nella stdlib | Libreria esterna, pluggable |
| Scheduling | Cooperativo, single-thread di default | Cooperativo, multi-thread con work stealing |
| GIL | Sì, limita parallelismo CPU | No, pieno parallelismo |
| Controllo memoria | Limitato, allocazioni nascoste | Esplicito, zero-cost abstractions |
| Type safety | Dinamica | Statica, Send/Sync/Pin |
| Learning curve | Dolce | Ripida, poi consistente |
| Ecosistema | Enorme, maturo | Grande, in crescita |
Prevedibilità vs velocità di sviluppo
Tokio e Rust ti obbligano a pensare in anticipo a:
- Lifetime dei dati condivisi tra task.
- Quali Future sono
Sende quali no. - Come gestire il pinning per API avanzate.
Questo allunga il tempo di sviluppo iniziale. Ma il payoff è:
- Meno sorprese in produzione: se compila, probabilmente non hai data race.
- Performance prevedibili: sai quanta memoria usa ogni task, il garbage collector non esiste.
- Capacità di spremere l’hardware: multi-core reale, latency tail sotto controllo.
I Miei Contributi: Esperienza sul Campo
Durante l’esplorazione di questi due mondi asincroni, ho avuto l’opportunità di contribuire a progetti in entrambi gli ecosistemi. Queste esperienze hands-on hanno consolidato la mia comprensione delle differenze filosofiche tra Python e Rust.
Tokio: Documentazione del Time Module
Ho contribuito a Tokio con due PR focalizzate sulla documentazione del modulo time:
PR #7858 — Miglioramento della documentazione sulla manipolazione del tempo nei test. Il problema: molti utenti scoprivano per trial-and-error comportamenti sottili come il fatto che spawn_blocking impedisce l’auto-advance del tempo quando è in pausa, o le differenze tra sleep e advance per forzare timeout nei test.
In Python, queste sfumature spesso non esistono — o sono nascoste dietro astrazioni che “funzionano e basta” finché non smettono di funzionare. In Tokio, il runtime ti espone questi dettagli perché sono parte del tuo modello mentale. La documentazione ora spiega chiaramente quando usare quale approccio:
| |
PR #7798 — Cross-reference nella documentazione di copy e copy_buf, con focus su SyncIoBridge. In Rust esistono due “mondi” di I/O — sincrono (std::io) e asincrono (tokio::io). Molte librerie esistenti (hasher, compressori, parser) sono sincrone. SyncIoBridge è l’adapter che permette di usarle in contesto async senza bloccare il runtime.
L’esistenza stessa di questo bridge evidenzia una differenza fondamentale: in Rust devi essere consapevole del confine tra sync e async, mentre in Python questo confine è molto più sfumato (e spesso fonte di bug sottili).
datapizza-ai: Async che Non Era Async
Sul fronte Python, ho contribuito a datapizza-ai, un framework per soluzioni GenAI. Ho trovato un pattern molto diffuso ma problematico: metodi marcati async che non contenevano nessun await.
| |
Chi chiamava await a_embed(...) si aspettava di cedere il controllo all’event loop, ma in realtà il codice bloccava tutto per l’intera durata dell’embedding. La fix è stata usare asyncio.to_thread():
| |
Riflessioni dall’Esperienza
Contribuire a entrambi gli ecosistemi ha cristallizzato una differenza chiave:
- In Rust/Tokio, il compilatore ti obbliga a pensare ai confini async/sync. Non puoi “fingere” che qualcosa sia asincrono — il sistema di tipi ti smaschera.
- In Python/asyncio, la flessibilità del linguaggio permette pattern che sembrano corretti ma nascondono problemi. Il bug
async defsenzaawaitè comune proprio perché Python non ti ferma.
L’esperienza di review su Tokio è stata particolarmente istruttiva: la community è attenta alla documentazione quanto al codice, perché in un runtime esplicito come Tokio, capire il modello mentale è importante quanto usare l’API.
Quando Python, quando Rust: linee guida pratiche
Dopo tutta questa teoria, la domanda pratica: cosa uso per il mio prossimo progetto?
Resta su Python/asyncio se:
- La maggior parte del lavoro è I/O-bound ad alto livello: chiamate HTTP, orchestrazione di microservizi, query a database, interazione con LLM.
- Il collo di bottiglia è fuori dal tuo processo: tempo di risposta di API esterne, latenza di rete, lentezza del database.
- Hai bisogno dell’ecosistema Python: pandas, numpy, librerie di ML, tooling di data engineering.
- La velocità di sviluppo conta più delle performance pure.
- Stai prototipando qualcosa che potrebbe evolvere.
Il messaggio chiave: se il tuo problema principale è complessità di dominio e non complessità di sistema, asyncio ti permette di muoverti velocemente con un cost model good enough.
Considera Rust + Tokio se:
- Hai requisiti stringenti su latency tail (p95, p99) o throughput sotto carico.
- Stai costruendo infrastruttura: servizi centrali ad alto carico, componenti di data platform, gateway, proxy.
- Non puoi permetterti leak di memoria o comportamenti imprevedibili sotto stress.
- Il modello di esecuzione non è un dettaglio implementativo, ma il tuo vero prodotto.
- Vuoi multi-core reale senza lottare con il GIL o il multiprocessing.
Il messaggio chiave: Rust + Tokio diventano interessanti quando il come il codice viene eseguito è importante quanto il cosa fa.
Conclusione: stessa keyword, filosofie diverse
async/await è diventato una parola d’ordine, ma sotto la superficie nasconde modelli molto diversi.
In Python, l’asincrono è una promessa di semplicità: “pensa al flusso logico, ci pensa il runtime”. È un pattern di programmazione di alto livello, ottimizzato per produttività e velocità di iterazione. Il costo è una certa opacità: non sempre sai quanto costa un task, non sempre sai se stai davvero cedendo il controllo all’event loop.
In Rust, l’asincrono è una promessa di controllo: “pensa al layout del tuo codice nel tempo e nello spazio, il compilatore ti aiuta a non sbagliare”. È un’astrazione zero-cost che si materializza in state machine con memoria nota a compile time. Il costo è una curva di apprendimento più ripida e un sistema di tipi che a volte sembra ostile.
Nessuno dei due approcci è “migliore” in assoluto. Sono ottimizzati per problemi diversi, team diversi, fasi diverse di un progetto. La cosa importante è capire quale trade-off stai facendo quando scegli l’uno o l’altro.
E se dopo questo articolo ti è venuta voglia di esplorare Tokio più a fondo, nel prossimo post entreremo nel dettaglio del runtime: come funziona lo scheduler, come sono implementate le Future, e cosa succede davvero quando chiami .await.
Orizzonti Futuri: Dove Va l’Asincrono
L’ecosistema asincrono in entrambi i linguaggi è in rapida evoluzione:
Python: Il PEP 703 (rimozione opzionale del GIL) e il lavoro su “free-threaded Python” in 3.13+ potrebbero cambiare radicalmente il panorama. Se il GIL diventa opzionale, asyncio potrebbe non essere più l’unica via per la concorrenza I/O-bound performante. Tuttavia, il modello async/await rimarrà rilevante per la sua ergonomia.
Rust: L’ecosistema si sta consolidando attorno a Tokio, ma alternative come async-std e smol offrono trade-off diversi. Il supporto per async fn nei trait (stabilizzato in Rust 1.75) apre nuove possibilità per API generiche. Il lavoro su io_uring (tramite tokio-uring e glommio) promette performance I/O ancora migliori su Linux.
Interoperabilità: Progetti come PyO3 permettono di scrivere estensioni Python in Rust, combinando la produttività di Python con le performance di Rust. Per workload asincroni critici, è possibile implementare il “hot path” in Rust e orchestrare da Python.
Il futuro non è “Python vs Rust” ma piuttosto capire quale strumento per quale problema. La stessa keyword async/await continuerà a significare cose diverse nei due mondi — e questa è una feature, non un bug.
Le PR citate in questo articolo: tokio#7798 (SyncIoBridge docs), tokio#7858 (time manipulation docs), datapizza-ai#106 (async embed fix).